Canny Edge Detection
Canny Edge Detection is a popular edge detection algorithm used in computer vision to detect sharp discontinuities in an image.
Step 1: Noise Reduction (Gaussian Smoothing)
Since edge detection is susceptible to noise, the first step is to apply a Gaussian filter to smooth the image and reduce noise.
Step 2: Gradient Calculation
Compute the intensity gradients of the image using Sobel filters. This gives two gradient images: one in the x-direction and other in y-direction
Step 3: Non-maximum Suppression:
After calculating the gradient magnitude and direction, thin the edges by suppressing any pixel that is not considered to be a part of an edge. This is done by comparing the pixel intensity to its neighboring pixels along the gradient direction, and only retaining the local maxima.
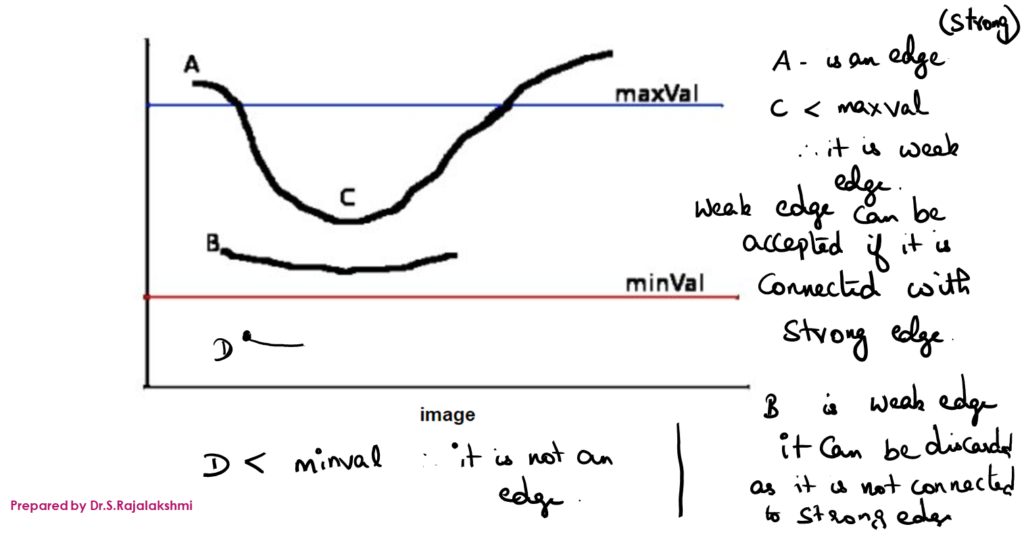
Step 4: Double Threshold:
The algorithm uses two thresholds (a lower and a higher one) to classify edges:
- Strong edges: Pixels with gradient magnitude above the high threshold.
- Weak edges: Pixels with gradient magnitude between the high and low thresholds.
- Non-edges: Pixels with gradient magnitude below the low threshold are discarded.
Step 5: Edge Tracking by Hysteresis:
Finally, weak edges are either discarded or accepted based on their connectivity to strong edges. If a weak edge is connected to a strong edge, it is considered part of an edge, otherwise, it is discarded.
edges = cv2.Canny(image, threshold1, threshold2)- image: The input image, usually in grayscale.
- threshold1: The lower threshold value for edge detection.
- threshold2: The upper threshold value for edge detection.
![]()
Views: 7